CPUなどを買うと周辺機能LSIも必要で、規格表はお店でパラパラ見るより手元にあったほうが妄想がはかどるので、そのうち買うことになったわけですが、その中にこれでもかとばかりに特徴が並べ立てられていてちょっと気になるLSIがありました。1年半ほど前ちょっと思い出したときに、たまたま取説を入手することができたので、また調べてみると面倒な部分がコンパニオンチップ化されているようなので1)2)3) とりあえず買ってみたもの
日立HD63484(Advanced CRT Controller)
日本ではパソコンに標準搭載された例はないようですが、 カーナビ4) や産業用に採用されて売れたとのこと、 海外(IBM PC)では画面表示系はユーザー側で選べたためか、パソコンCAD用に採用例5) があったようです。
マイクロコード動作の描画プロセッサーと入出力プロセッサーとメモリー管理プロセッサーが協調して動く構造となっており、トランジスター数11万といわれています。
グラフィックに関しては昔のパソコンBASICにあった図形描画命令文に近い直線、円、縁故、楕円、楕円弧の描画機能やメモリー間転送機能を持ち、それぞれ演算モードや線のパターンが指定でき、白黒(画素当たり1ビット)から65536色(画素当たり16ビット)まで表示用メモリーの回路構成を変えずに取り扱えて、色数の設定に関係なく同じ速度で描画処理できる、閉領域内のパターン塗り(2値16X16ドットあるいは65536色4×4ドット)もほぼ自動ということで出現当時相当注目されていたようですが、高機能だっただけに初期版は不具合がいくつも残っていたようです。最大動作周波数は4MHz,6MHz,8MHz,9.8MHzがあったようです。
メモリーに入っている画像を所定の速さで一画素分ずつ読みだして映像信号として出力する部分の回路は、原理は単純ですが、ロジックIC数十個以上の煩雑さになるので、1986年ごろには画面制御用のHD63485(GMIC:DRAM制御)および63486(GVAC:映像信号作成)3) 、さらに後には640×400(または640×480)の16色表示程度までに機能を絞り、さらにスタティックカラムモードDRAMの高速連続読み出し機能を活用して部品数を減らすことを狙ったようなHD63487(MIVAC)というコンパニオンチップも出ました。
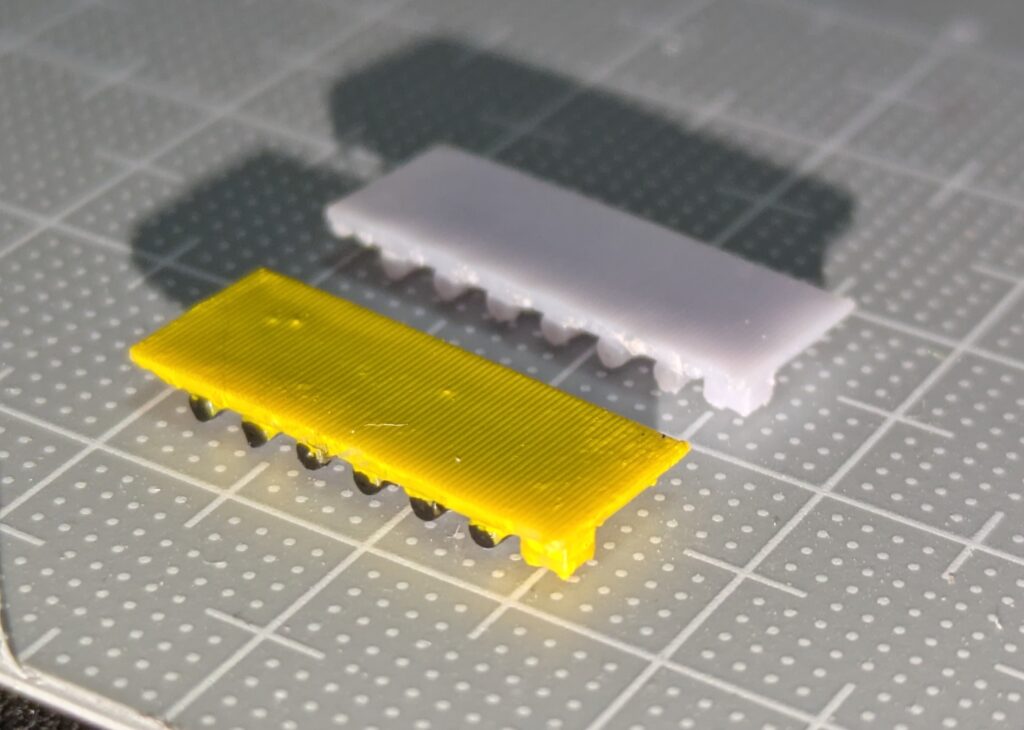
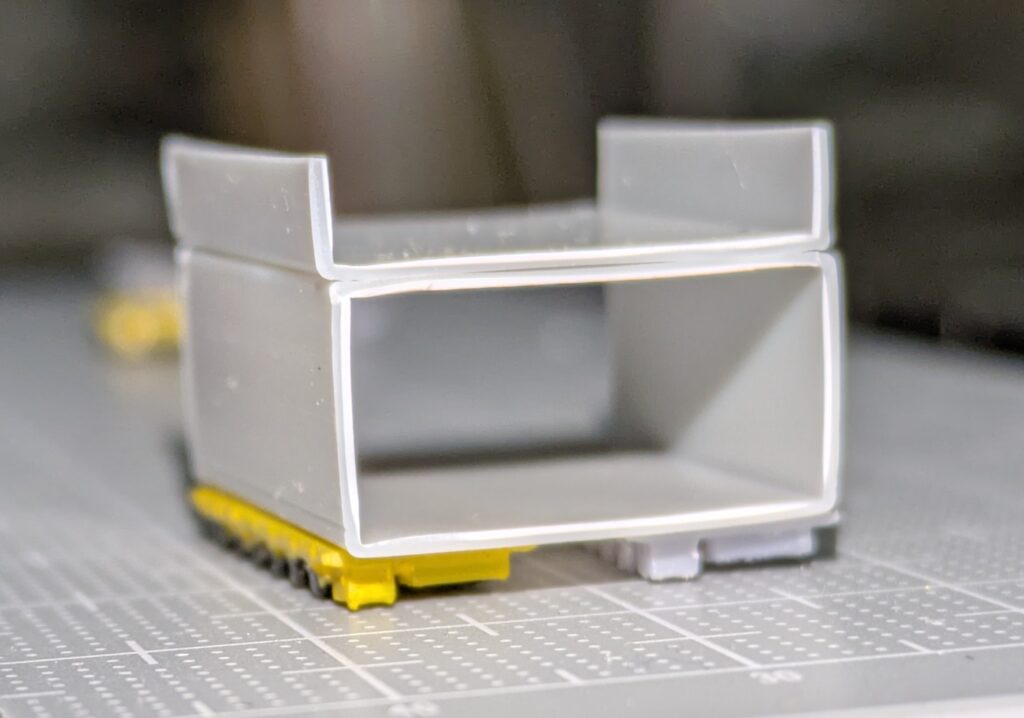
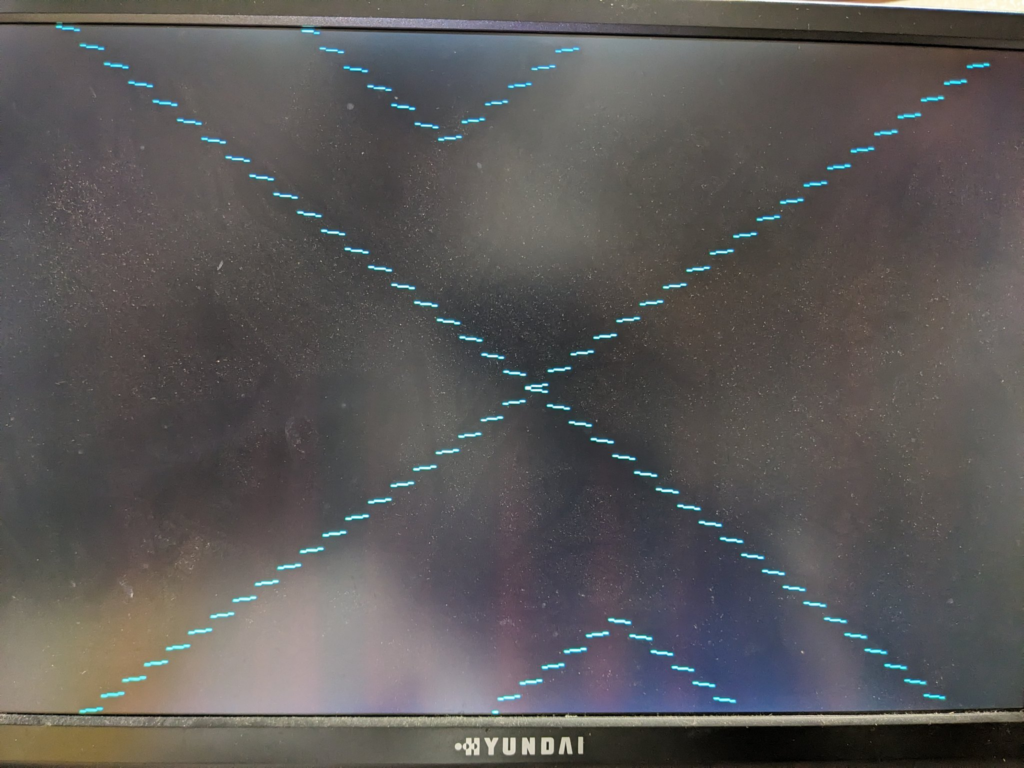
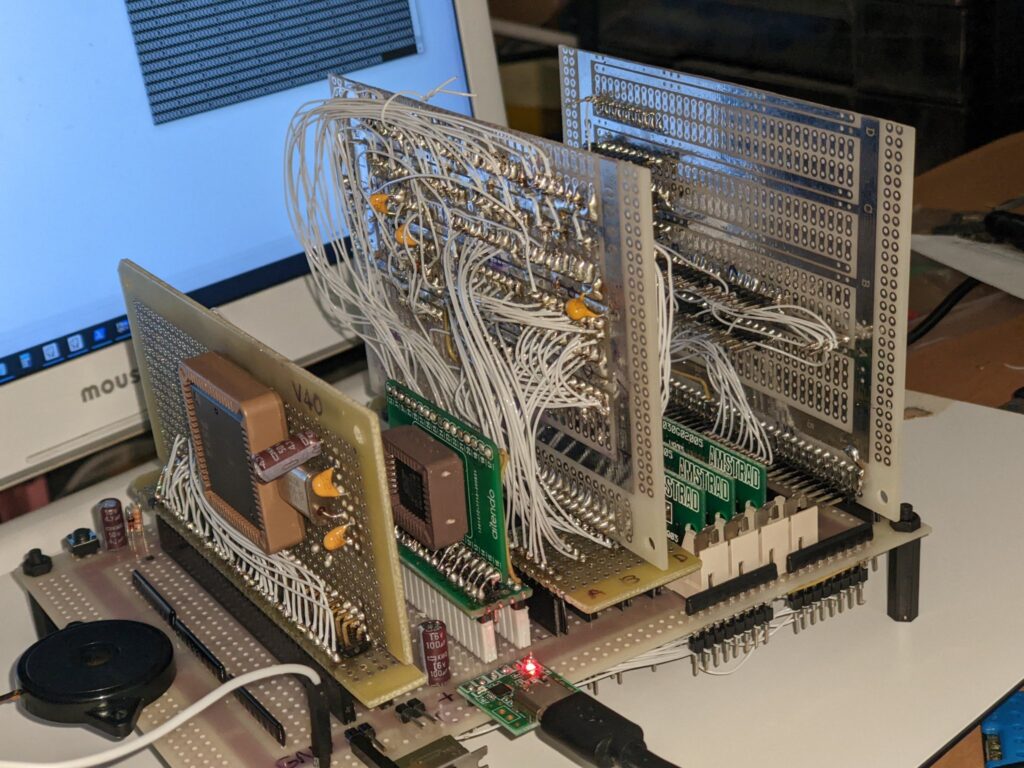
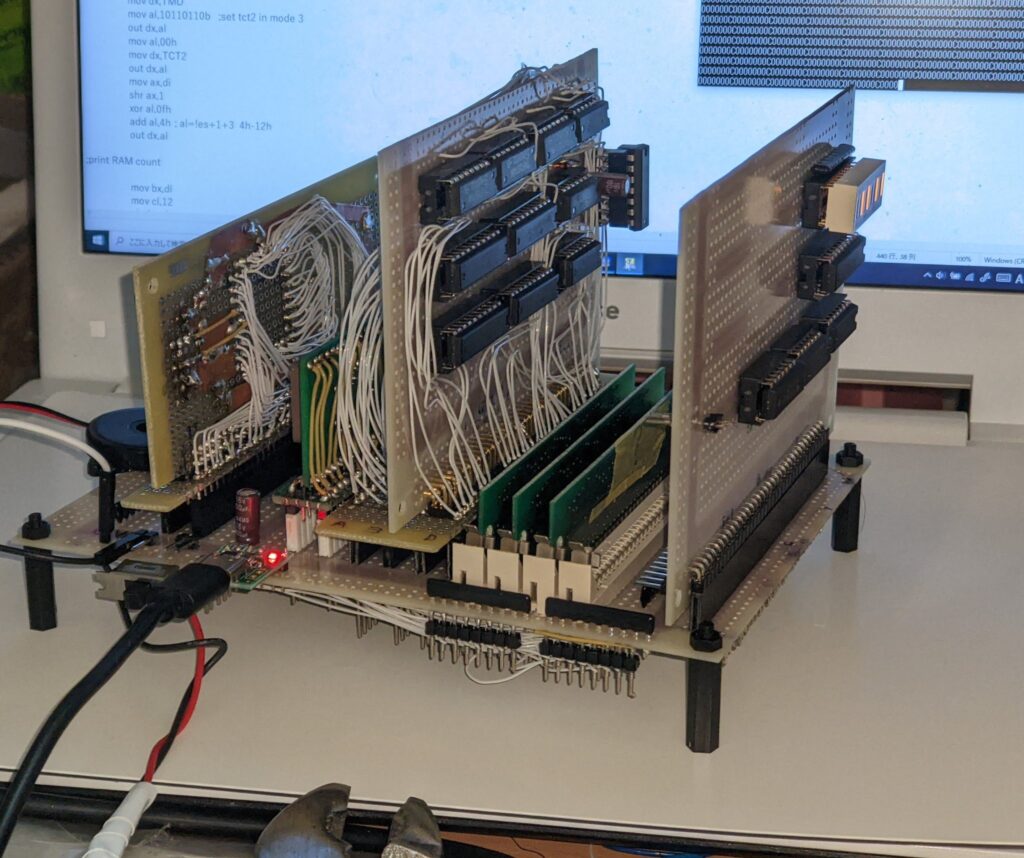
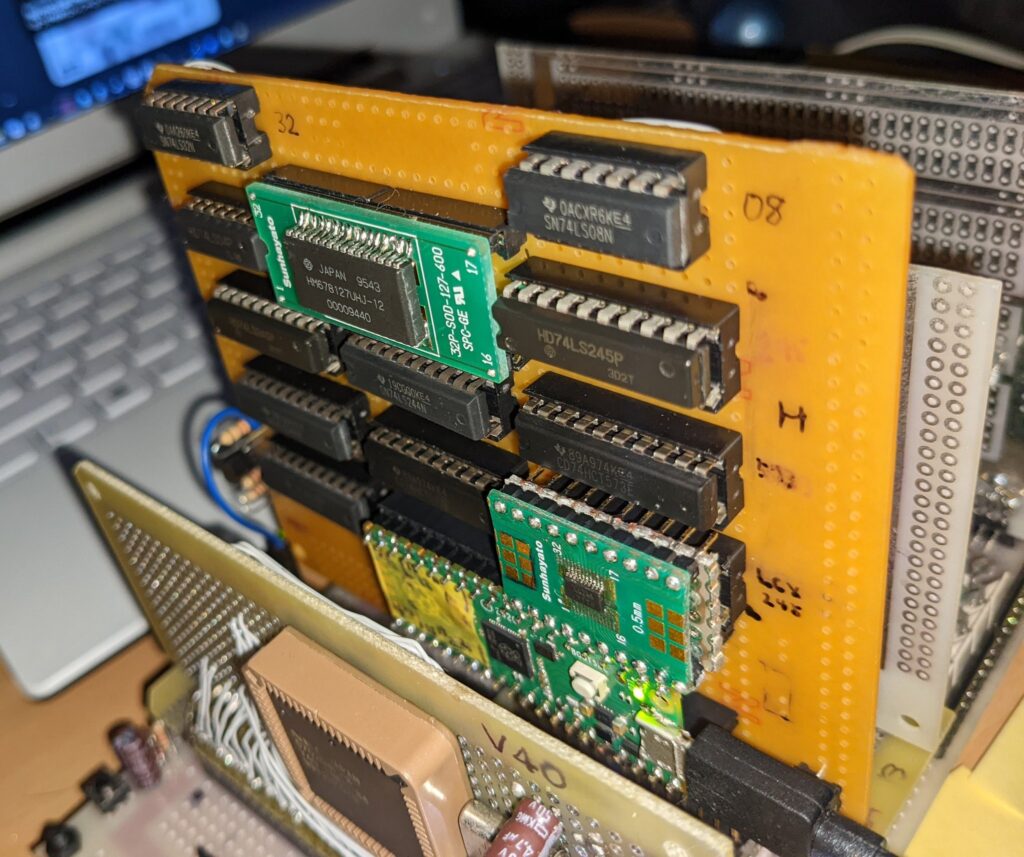
前回のV40の装置につなげて動かすのですが、もともと信号のタイミングが違うモトローラ68000の周辺ICとして企画されているので、インテル8086系で使うにはちょっと工夫が必要です。その工夫のところはEEPLDでやってるので、中身が見えません。当初からなんか動作が怪しく、V40側のリセット回路を改良して、ようやく曲りなりに動いて初期設定と対角線を引くコマンドが実行できたけど画面に周期的なゴミがあるとかアドレスデコーダーの出力を受けているEEPLDの入力専用端子がたまにHに張り付いてしまうとかでちょこちょこいじったところから放置されています。 ソケットの接触がちょっと怪しいとか、アース端子を浮かせざるを得なかった温調はんだごてが漏電気味の状態でDRAMのはんだ付けしたので傷んでしまってないかなど思い当たるところもあります。
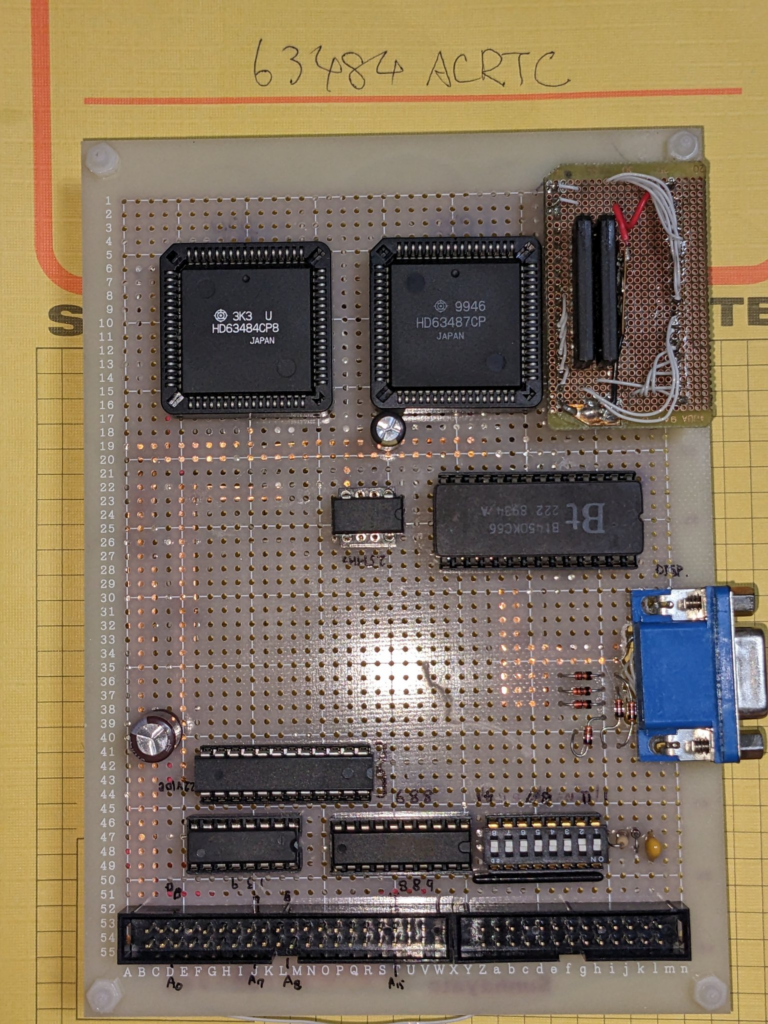
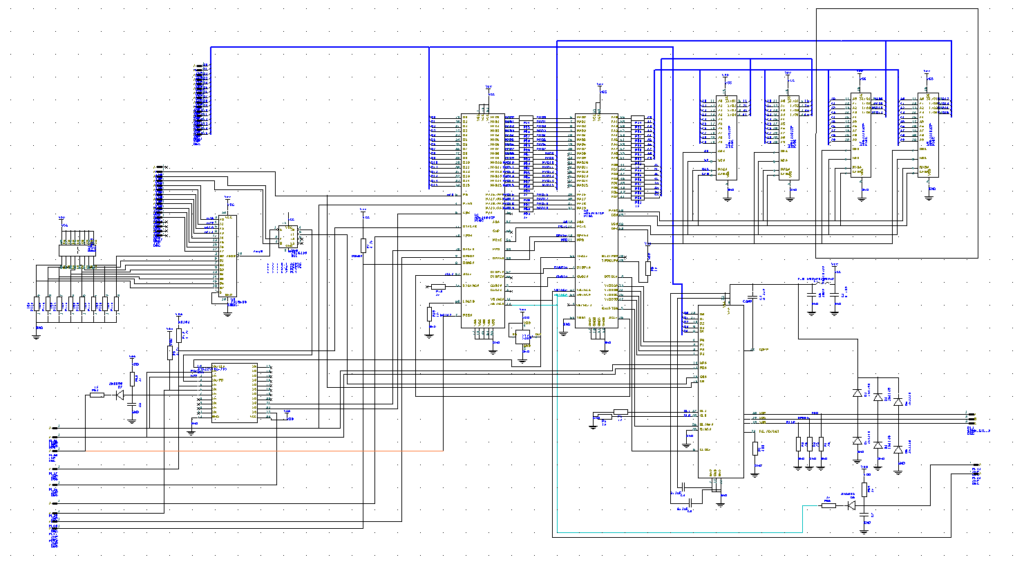
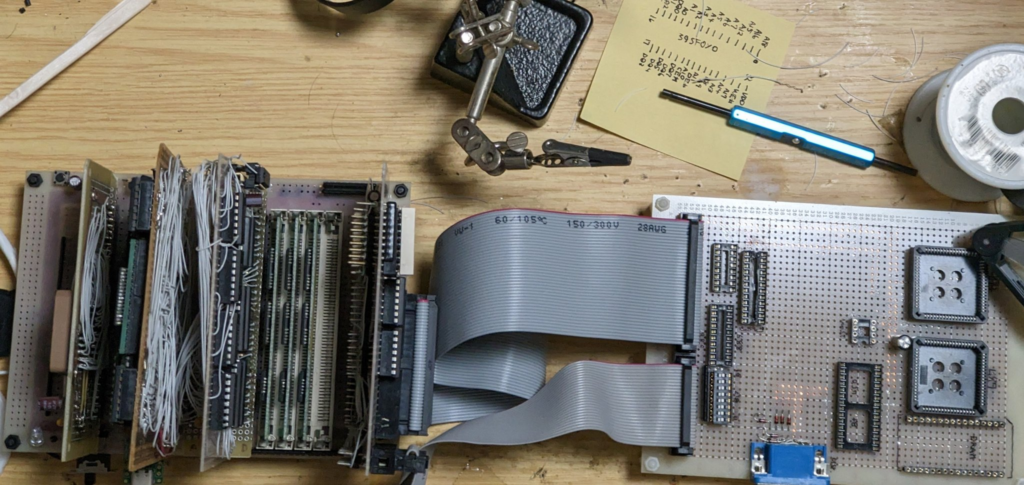
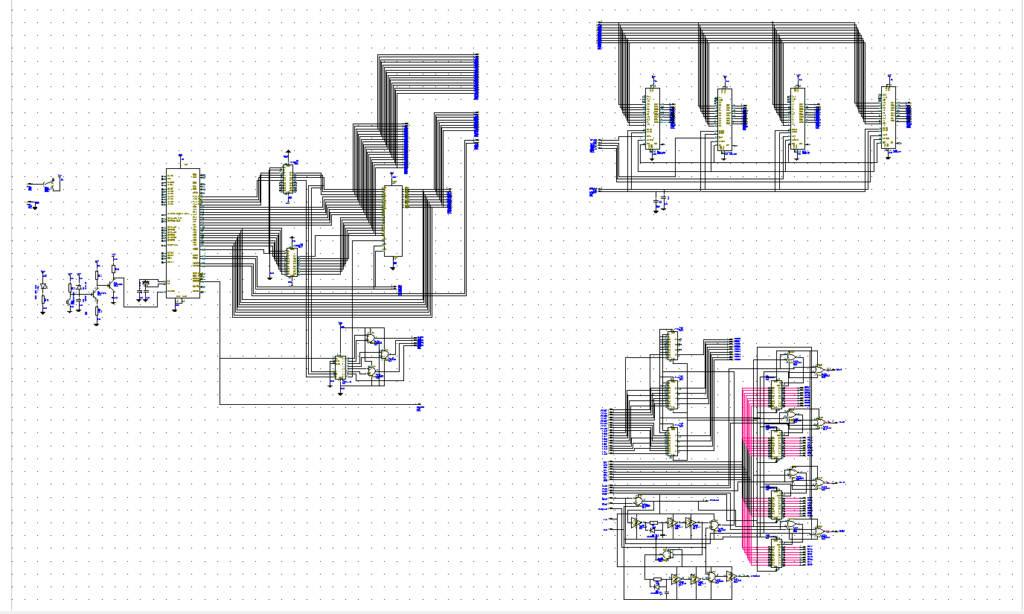
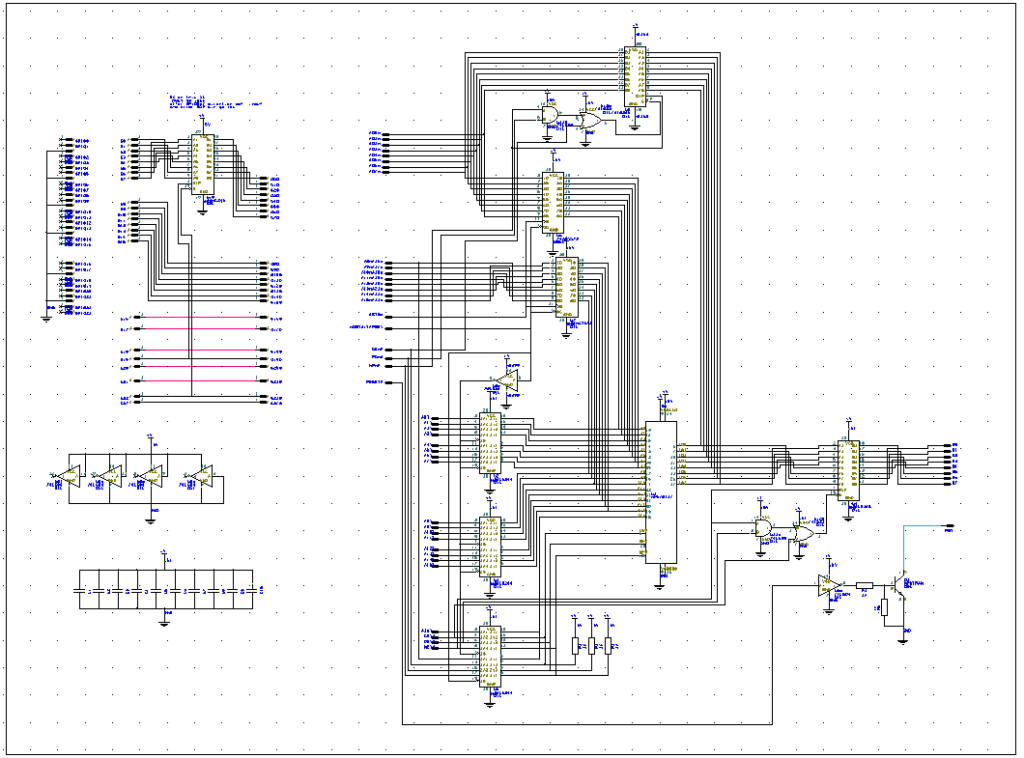
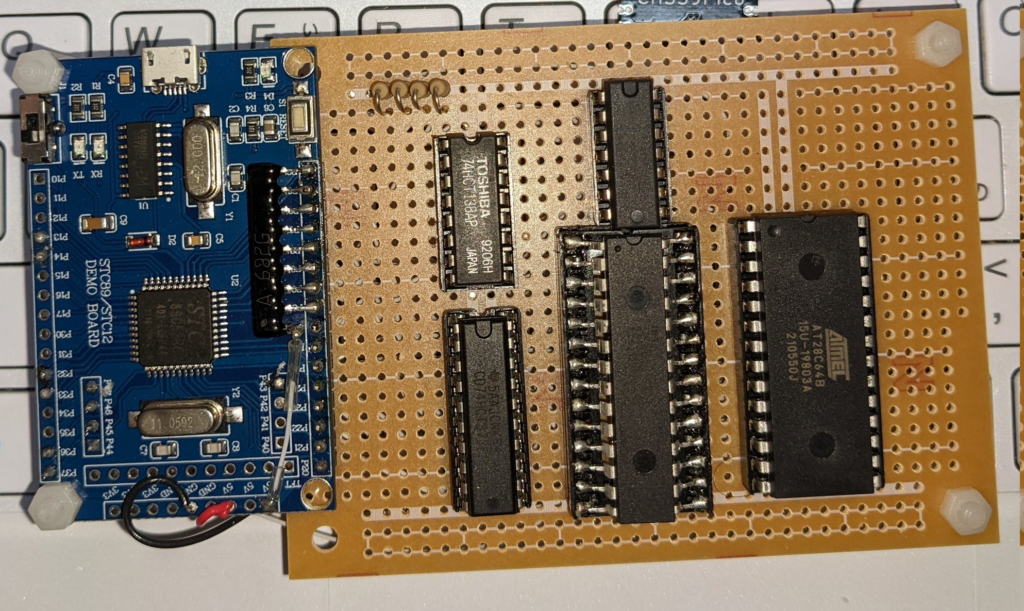
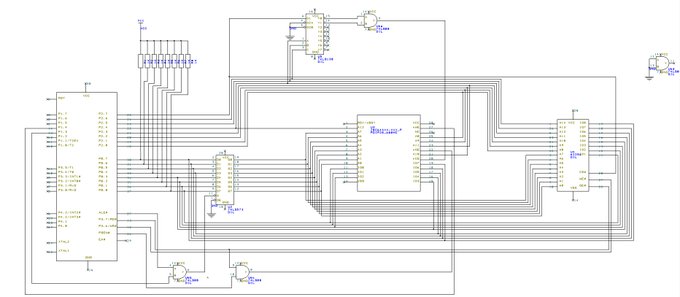
ACRTCボード(HD63484+HD63487+HM514402+Bt450) 回路図 現状の動作(640x480x4bpp)映像にブロック状のごみが出る他 タイミングがおかしいなど 映像信号のタイミングはVGAにせよVESAにせよACRTCの仕様ではうまく設定できないので、モニター(Hyundai X93W系) の心の広さに頼っています。自動調整だと水平位置がずれるので手動調整が必要でした。
V40とつながっている状態 ついででV40の方の電源を強化できるように電源をDCジャックに変えたときに逆接続で通電してこのボードも巻き込まれてしまい、V40を直さないとデバッグもできなくなってしまいました。
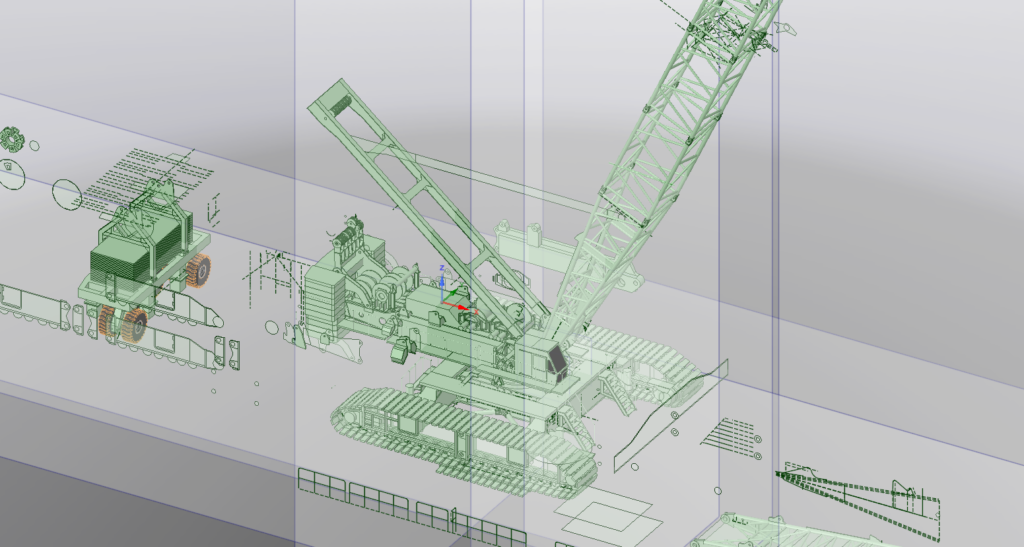
2003年当時は模型のモーメントリミッター画面にNEC PC-9801シリーズに使用されていて手元に資料があったGDC(NEC μPD7220)を使うフルグラフィックのものを考えていましたが、実現しないうちにシリアルバス接続のカラードットマトリックスLCDがホビーユースでも普及してしまい、作る意味が割と薄れてしまいました。
1)淺野 春生:Electrelic 電子的遺物の世界へようこそ Hitachi HD63484 ACRTC
2)try:try’s page 半導体コレクション展示会場 ACRTC
3)日立評論1987年7月号
4)日本半導体歴史館 集積回路 1980年代:カラーグラフィックス表示市場の拡大
5)Peddie, Jon:Chasing Pixels GPU History: Hitachi ARTC HD63484